
许多车辆使用基于可见光的传感器系统来检测物体并作出相应地反应,通常依赖于相对清晰的路径来检测物体。由于雾会“散射”光线,使其行为与通常情况不同,因此,雾状道路条件对于使用这些系统的自动驾驶车辆可能会带来很多问题。
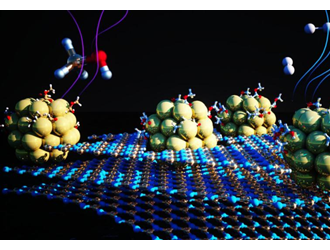
为了解决这一问题,MIT研究人员Guy Satat、Ramesh Raskar和Matthew Tancik开发出一款基于激光的成像系统,即使是在浓雾中也可准确计算与物体的距离。该系统使用从摄像头中发射出来的短脉冲激光,并计时反射时间。

研究人员通过新型处理算法发现,无论雾多厚,散射激光的到达时间总是遵循特定的分布模式。摄像机每隔万亿分之一秒会对返回传感器的光子数进行计数,当这些结果绘制成图表时,系统能够应用特定的数学滤波器来显示数据尖峰,进而揭示隐藏在雾中的实际物体。
研究人员在长约1米的实验室里测试成像系统,该系统比人眼的识别范围远21厘米。当放大到真实环境的尺寸和条件时,雾的浓度不会像研究人员人为创造地那么厚,因此,该系统将能够看到远距离的物体,让车辆有足够的时间作出反应并规避碰撞。